When using Percepio TraceRecorder, kernel objects like queues, semaphores and mutexes are named using their address by default. This can be a bit hard to follow for complex traces. However, it is quite easy to set more descriptive custom names for your RTOS kernel...
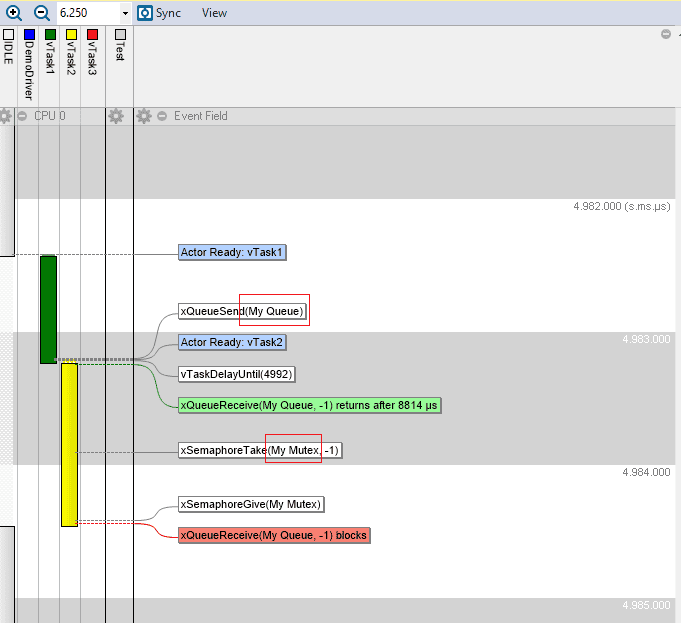
Naming your kernel objects
read more